客戶咨詢熱線:
18922517093
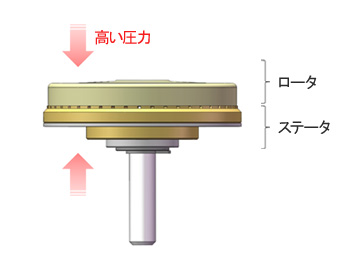
施加到轉子和定子上的力的圖像
超聲波電機通過向壓電陶瓷施加電壓而使其變形,并且該變形被定子金屬放大并傳播,導致定子金屬的表面變形為波狀形狀。該波的峰值作為行波移動,導致與定子接觸的轉子由于摩擦力而旋轉。
由于轉子和定子之間施加高壓,因此停止時最大的摩擦力是超聲波電機的保持力。
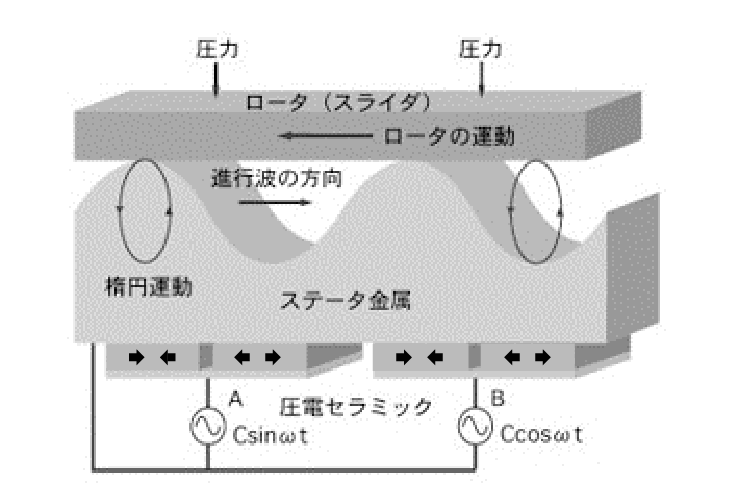
轉子旋轉原理圖
通過向壓電陶瓷施加電壓,壓電陶瓷發生變形和扭曲,并且這種變形被定子金屬放大并傳播,在定子金屬的表面上產生行波。
這里,定子金屬僅在表面行波的每個頂點處接觸轉子,并且每個頂點以橢圓運動運動。
轉子在其橢圓運動的影響下旋轉。
這種橢圓運動的軌跡與行波傳播的方向相反,受其影響的轉子也沿與行波相反的方向旋轉。
換句話說,當行波繞定子圓周順時針 (CW) 傳播時,接觸轉子的行波的每個頂點都會經歷逆時針 (CCW) 橢圓運動。
與波峰接觸的轉子沿與橢圓運動相同的方向逆時針 (CCW) 旋轉。
通過控制該行波的速度和方向,可以在CW和CCW方向之間切換,實現超聲波電機的高響應性。
Shinsei Kogyo的超聲波馬達:USR系列具有小型、低速、高扭矩、并具有優異的響應性和安靜性。此外,由于它在未通電時具有較高的保持力,因此可以構建總重量較輕的運動部件,而無需齒輪或其他減速器。
超聲波電機不使用線圈或磁鐵的電磁力作為驅動力,并且不受磁力的影響。
另外,由于旋轉時不產生磁性,因此可以在MRI或超導實驗設備附近等強磁場環境中安全使用。
超聲波電機目前有著廣泛的應用。
| ?相機自動對焦 | ?測量儀器控制單元 |
| ?光學設備透鏡鏡的驅動裝置 | ?接收人造衛星信號的設備的定位 |
| ?工業機器人用夾持裝置 | ?卷簾自動控制裝置 |
| ?輸送零件的進給裝置 | ?MRI測量儀器的姿勢控制 |
| ?高磁場環境下的執行器 |
超聲波電機的特點是轉速低,每分鐘幾十到幾百轉,扭矩大。
無需齒輪或其他減速機構即可直接驅動,從而可以構建零齒隙的運動部件。
即使電源關閉,超聲波電機也會因摩擦力而保持較高的保持力。
因此,超聲波電機不需要制動器或離合器,從而可以構建沒有電磁制動器或離合器的輕量化系統。
轉子的慣性小,轉子與定子之間的摩擦產生的制動力大,因此在停止時表現出優異的響應性。
速度控制也是無級的,機械時間常數小于1[ms],提供優異的可控性。
因此,高精度的速度和位置控制是可能的。
超聲波電機不產生電磁波,因為它們不使用繞組或磁鐵。
特別是非磁型超聲波電機不使用任何磁性材料,因此在強磁場環境下也能穩定運行,不受磁性的影響。
與使用電磁力且具有相同扭矩的電機相比,它們更小、更薄且重量僅為其一小部分。
通過將其用作多關節機器人的手臂和腿部的執行器,可以減輕各關節的重量。
因此,我們可以期待機器人和整個系統的響應能力和有效負載的提高。
用于驅動的振動在聽不見的范圍內,因此運行噪音非常安靜。
此外,通過不使用齒輪,可以避免驅動單元發出的噪音。
